协议实现
Layer 1 物理层
在Linux操作系统上,UART设备被抽象为TTY设备,在/dev/下可以看到ttyS0等便是串口设备,在LInux上使用Termios API对串口进行控制操作,具体见Termios,打开读写操作还是使用正常的open,read,write函数,毕竟Linux的设计哲学就是一切皆文件。
Linux应用层的串口编程示例
打开串口
int fd = open("/dev/ttyS0",O_RDWR );
设置波特率
struct termios attr;
tcgetattr(fd,&attr);
cfsetspeed(&attr,B115200);
tcsetattr(fd, TCSANOW,&attr);
读串口
char buf[1024];
int len = read(fd,buf,1024);
写串口
write(fd,buf,1024);
Linux驱动层的RS-485收发使能控制
因为MPI物理链路上使用RS-485,所以需要对485收发器进行收发控制,具体控制逻辑是串口发送数据时,485 发送使能脚UART_CON拉高,因为对应的接收使能脚是低电平有效,所以此时发送有效。当串口发送数据完毕后,将对应的485 发送使能脚UART_CON拉低,此时发送使能无效,接收使能有效,485收发器处于接收状态。
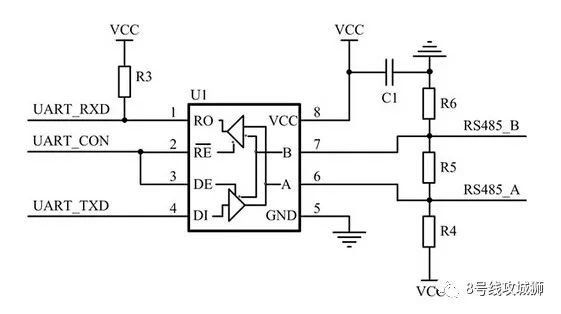
在驱动层面实现了对485控制器使能脚的逻辑切换,当应用层调用write函数向串口发送数据时,UART的硬件发送中断被打开,并且将485 发送使能脚UART_CON拉高, 驱动的中断函数会去把应用层的数据复制到UART的寄存器,UART根据自己的数字逻辑将FIFO中的数据通以设置好的串口帧格式串行发出,当UART发送完毕时,会再次触发发送中断,这个时候UART 驱动的中断函数判断到应用层的数据已经全部通过串口发送出去后,就会关闭发送中断,然后将对应的485 发送使能脚UART_CON拉低,进入接收状态。
Layer 2 物理链路层
分为PPI 和 MPI 来讨论
PPI
PPI在具体的实现上没有做成多主站模式,而是直接做成一主多从的模式,通过抓包昆仑通泰的PPI通信发现其实现就是一主多从,实际观感上刷新非常快,并且从数据流上看也非常简单直接。
之前提到的MPI通信有以下几个特征:
- MPI 有两种类型的设备:主站和从站
- MPI网络是一个令牌网,只有持有令牌的主站,才允许主动向其他PPI站点发送请求消息
- 从站不能持有令牌,只允许响应来自其他主站的请求
PPI也同样适用,不过因为我们的实现改成了一主多从,所以无需管理令牌,主站可以随时发送请求消息,从站不能主动发送消息,只允许响应来自其他主站的请求。
PPI一主多从的具体通信实例
- 主站,主站号为0
- 从站,从站号为3
建立连接
主站发送SD1消息: 10 03 00 49 4C 16
对应的消息解析:
SD1:消息头(0x10)
DA:目的地址03
SA:源地址00
FC:帧控制49(FDL查询)
FCS:帧校验(DA到FC的数据和)
ED:帧结束(固定:0x16)
从站响应SD1消息: 10 00 03 00 03 16
对应的消息解析:
SD1:消息头(0x10)
DA:目的地址00
SA:源地址03
FC:帧控制00(从站)
FCS:帧校验(DA到FC的数据和)
ED:帧结束(固定:0x16)
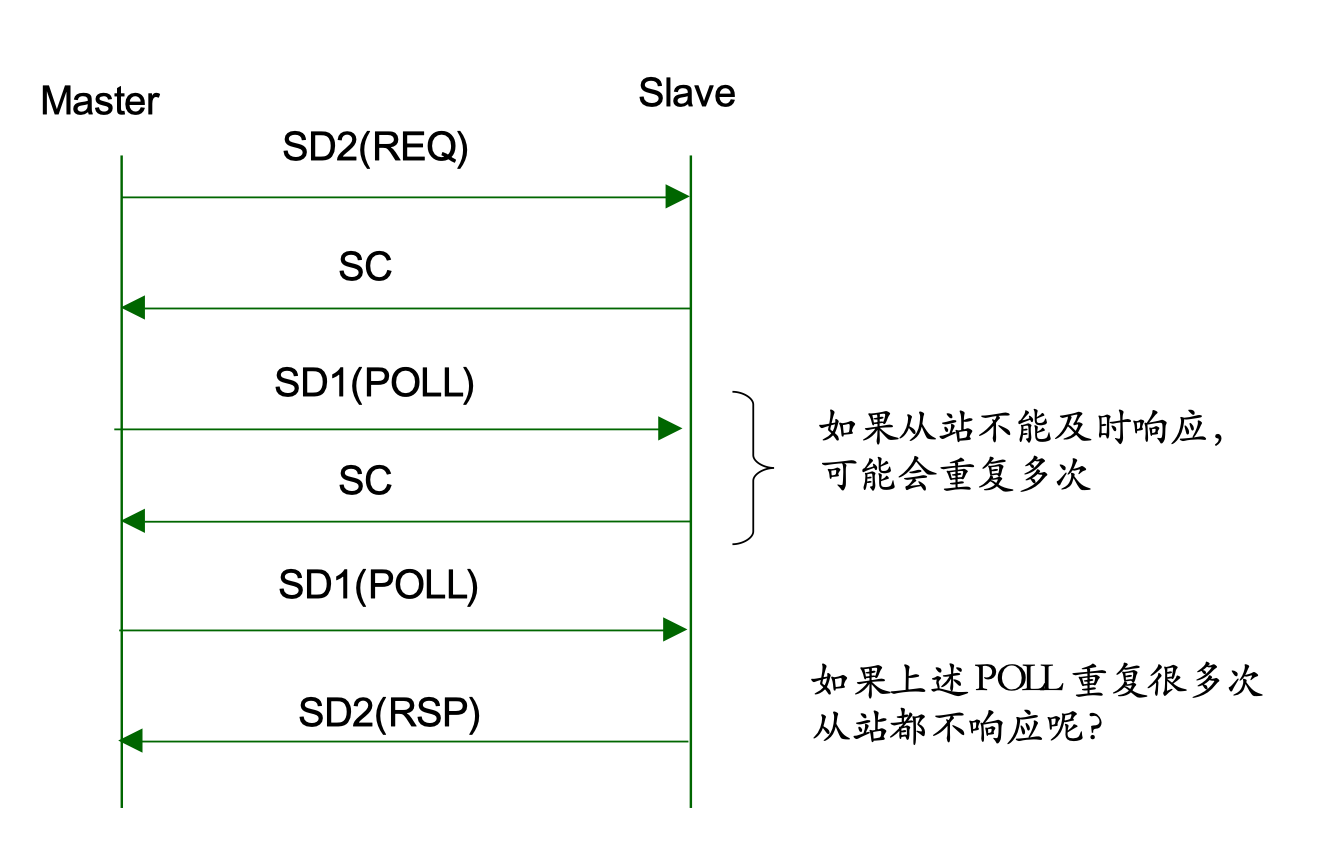
数据请求
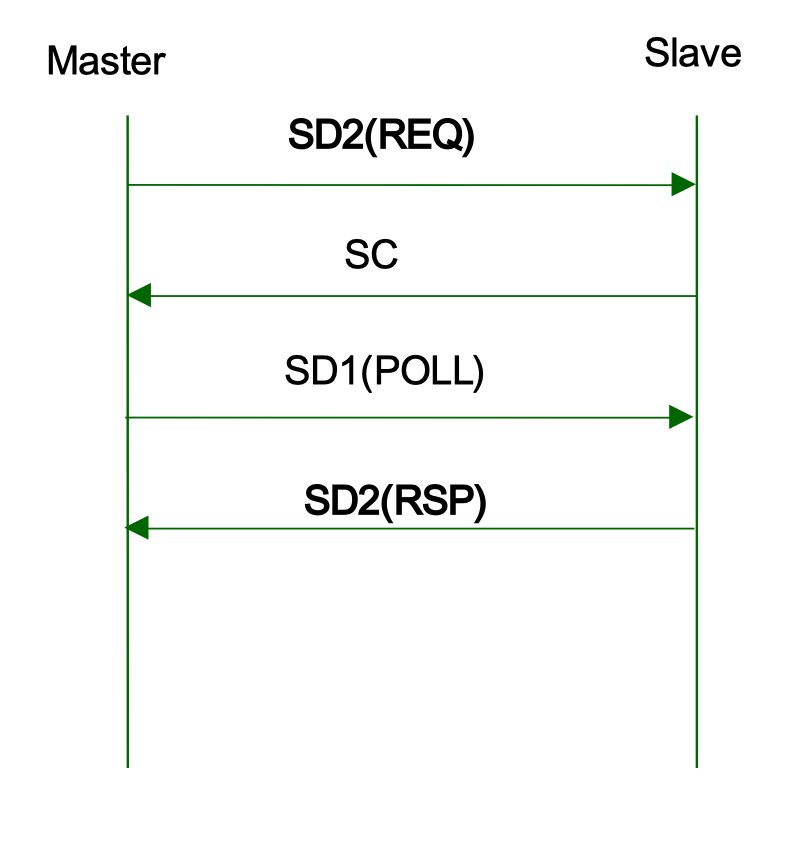
SD2 REQ ( 00 -> 03 )
68 1B 1B 68 03 00 5C 32 01 00 00 02 AE 00 0E 00 00 04 01 12 0A 10 02 00 14 00 01 84 00 00 00 1C 16
SC ACK (03 -> 00)
E5
POLL (00 -> 03)
10 03 00 5C 5F 16
SD2 ACK (03 -> 00)
68 29 29 68 00 03 08 32 03 00 00 02 AE 00 02 00 18 00 00 04 01 FF 04 00 A0 DB F5 DB F5 DB F5 DB F5 DB F5 DB F5 DB F5 DB F5 DB F5 DB F5 D2 16
具体的PPI 通信细节参考西门子PPI 通信手册, 参考价值极大。
MPI
MPI 设计为多主站多从站的通信模式,在层二主要由令牌管理和数据请求两部分组成
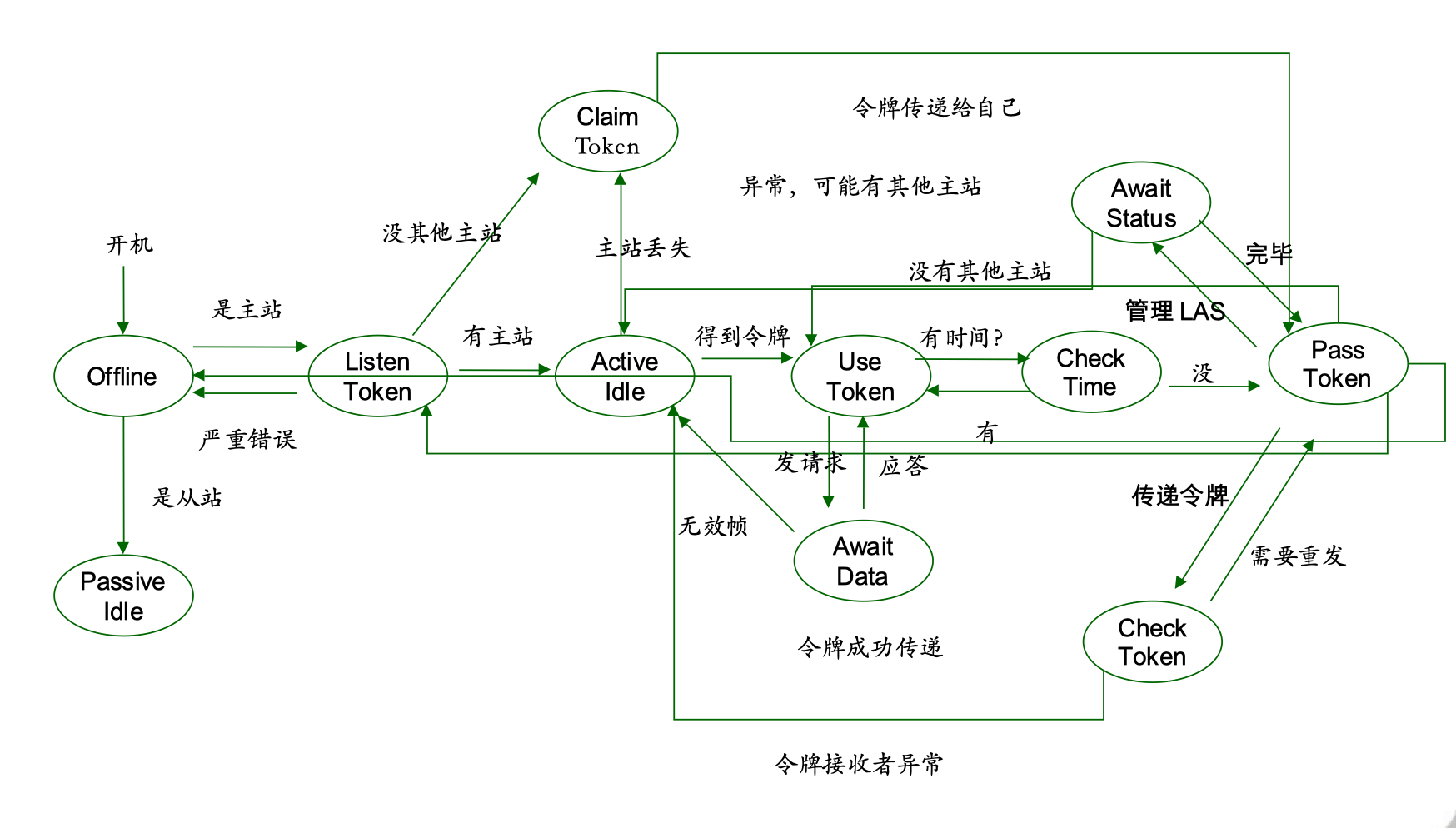
层2的11个状态(覆盖了层2的所有功能):
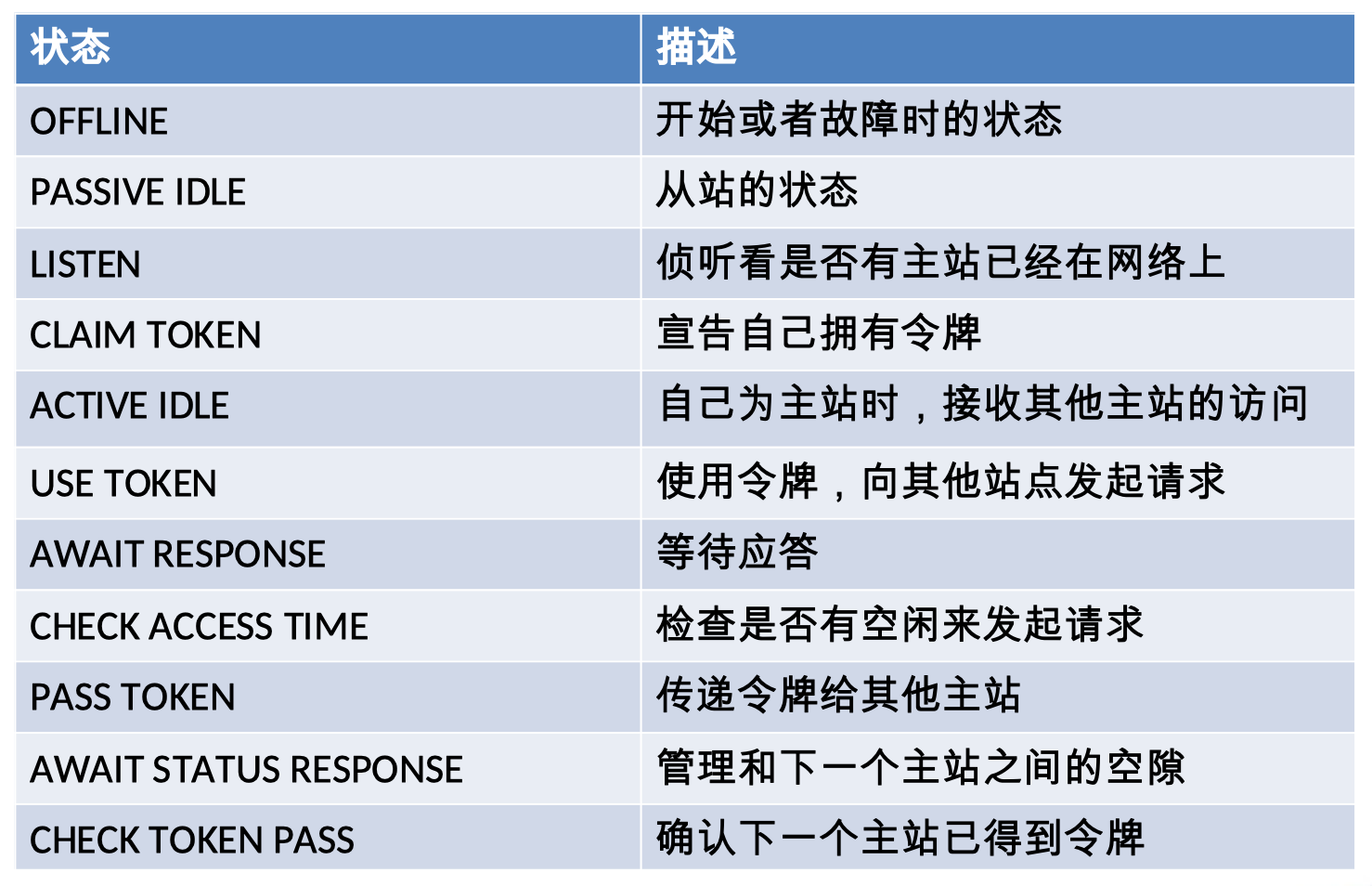
层二的状态转移主要如下图所示: